ปฏิสัมพันธ์ระหว่างมนุษย์กับหุ่นยนต์เกิดขึ้นได้ทั้งสองทาง เรามีหุ่นยนต์ที่เข้าใจ (หรือพยายามทำความเข้าใจ) มนุษย์ เช่นเดียวกับมนุษย์ที่เข้าใจ (หรือพยายามทำความเข้าใจ) หุ่นยนต์ แทบจะเป็นไปไม่ได้เลยที่มนุษย์จะเข้าใจหุ่นยนต์ แม้ในสถานการณ์ที่ดีที่สุด แต่ในทางกลับกัน หุ่นยนต์ที่มีเครื่องมือสื่อสารทุกประเภทที่พร้อมใช้งาน ทั้งแสง เสียง หน้าจอ ระบบสัมผัส มีตัวเลือกมากมาย ไม่ได้หมายความว่าการสื่อสารระหว่างหุ่นยนต์กับมนุษย์เป็นเรื่องง่าย แต่เนื่องจากรูปแบบการสื่อสารในอุดมคติคือ สิ่งที่มีต้นทุนต่ำและความซับซ้อนต่ำ ในขณะที่เกือบทุกคนสามารถเข้าใจได้

การจำลองพฤติกรรมลูกสุนัขของ Cobot เพื่อการสื่อสารกับมนุษย์ที่ดียิ่งขึ้น
ทางเลือกหนึ่งที่ดีสำหรับบางสิ่ง
เช่น แขนกลหุ่นยนต์ที่ทำงานร่วมกันคือการใช้ท่าทางที่ได้รับแรงบันดาลใจจากมนุษย์
(เนื่องจากไม่ต้องใช้ฮาร์ดแวร์เพิ่มเติม) แม้ว่าการเริ่มให้หุ่นยนต์ทำสิ่งต่าง ๆ
ของมนุษย์ก็เป็นเรื่องสำคัญไม่แพ้กัน แม้ว่าจะเป็นเรื่องสำคัญที่จะต้องระมัดระวัง
เพราะอาจทำให้เกิดความไม่สมเหตุสมผลได้
ความคาดหวังจะเกิดขึ้นถ้าผู้คนนึกถึงหุ่นยนต์ในแง่ของมนุษย์
เพื่อหลีกเลี่ยงปัญหานี้
นักวิทยาการหุ่นยนต์จากมหาวิทยาลัยอาเค่นจึงได้ทำการทดลองด้วยท่าทางที่เหมือนกับสัตว์สำหรับโคบอทแทน
โดยจำลองตามพฤติกรรมของลูกสุนัข
สำหรับหุ่นยนต์ที่มีต้นทุนต่ำและถูกจำกัดรูปลักษณ์
ท่าทางและพฤติกรรมที่ได้รับแรงบันดาลใจจากสัตว์จะมีประสิทธิภาพสูงขึ้นในด้านการสื่อสาร
แม้ว่านี่จะเป็นการทดลองที่น่ารัก แต่การเพิ่มหางน่ารัก ๆ
ให้กับโคบอทอุตสาหกรรมก็ไม่น่าจะเกิดขึ้นได้จริง
นั่นเป็นเพราะมนุษย์มีความเข้าใจโดยสัญชาตญาณเกี่ยวกับท่าทางของสุนัข
และสิ่งนี้ขยายไปถึงผู้ที่ไม่ได้เป็นเจ้าของสุนัข
แต่หางไม่จำเป็นสำหรับบางสิ่งบางอย่างเพื่อแสดงท่าทางของสุนัข
ปรากฎว่าคุณสามารถทำได้ด้วยหุ่นยนต์แขนกลมาตรฐาน
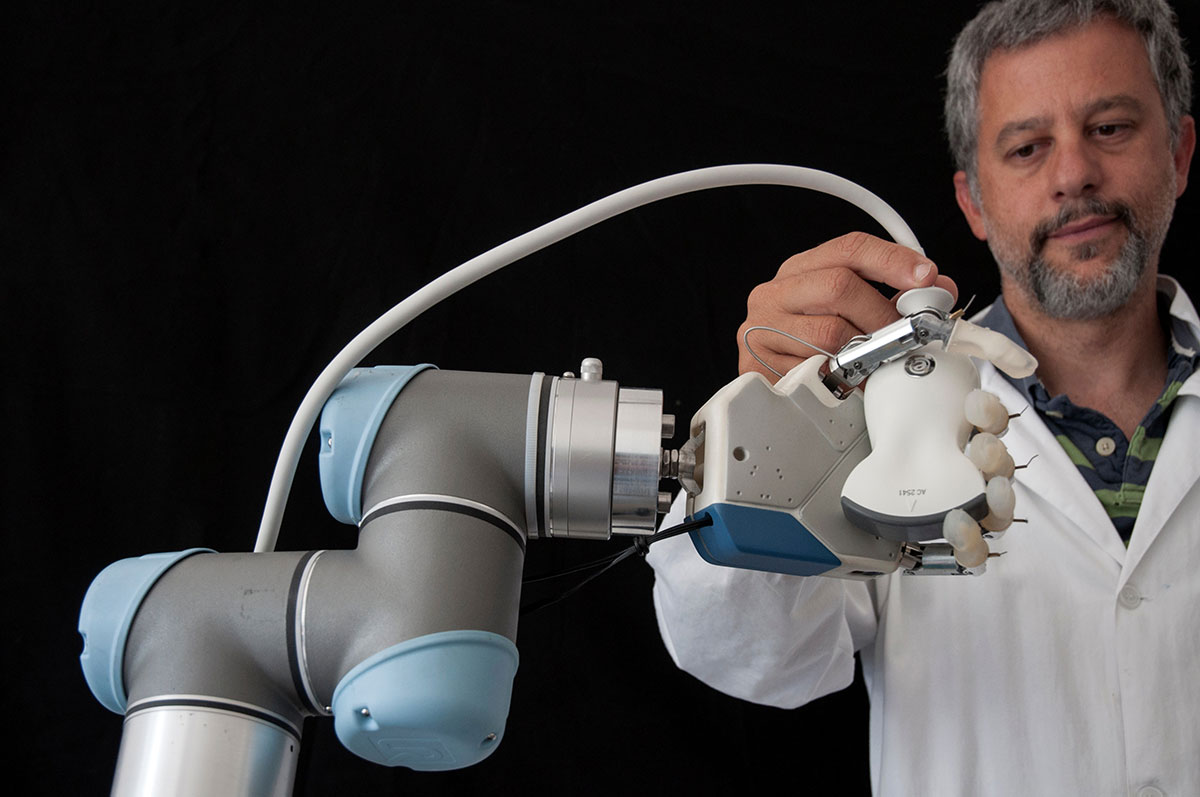
การตีพิมพ์งานวิจัยล่าสุดใน IEEE Robotics and Automation Letters (RA-L) ผู้เขียนคนแรก Vanessa Sauer ใช้ลูกสุนัขเพื่อสร้างแรงบันดาลใจในการสร้างชุดท่าทางสำหรับการสื่อสารของหุ่นยนต์แขนกลรุ่น
Franka Emika Panda โดยเฉพาะแขนที่จะใช้ในงานประกอบร่วมกัน
และจำเป็นต้องมีการสื่อสาร 5 สถานะกับผู้ใช้ที่เป็นมนุษย์
รวมถึงการทักทายผู้ใช้งาน การแจ้งให้ผู้ใช้มีส่วนร่วม รอคำสั่งใหม่
ความผิดพลาดเมื่อคอนเทนเนอร์ที่วางชิ้นส่วนว่างเปล่า หลังจากนั้นจึงปิดตัวลง รายงานการวิจัยบางส่วนมีดังนี้

“สำหรับแต่ละกรณีการใช้งาน
เราสะท้อนถึงความตั้งใจของหุ่นยนต์ (เช่น การกระตุ้นให้ผู้ใช้มีส่วนร่วม) กับความตั้งใจที่สุนัขอาจมี
(เช่น การสนับสนุนให้เจ้าของเล่นกับมัน) ในขั้นตอนที่ 2
เรารวบรวมท่าทางที่สุนัขใช้เพื่อแสดงพฤติกรรมต่าง ๆ โดยใช้ประโยชน์จากปฏิสัมพันธ์ในชีวิตจริงกับสุนัข
จากนั้นเราจึงแปลท่าทางสุนัขเป็นท่าทางที่แตกต่างกัน 3 แบบ โดยนำแนวทางต่อไปนี้มาใช้ร่วมกัน
ซึ่งได้รับแรงบันดาลใจจาก:

- การเลียนแบบ
เราเลียนแบบพฤติกรรมสุนัขและภาษากายที่เฉพาะเจาะจงเพื่อสื่อสารสถานะของหุ่นยนต์
- การใช้ประโยชน์จากความคล้ายคลึงกันของโครงสร้าง
แม้ว่าCobotจะได้รับการออกแบบตามการใช้งาน
แต่เราใช้ประโยชน์จากส่วนประกอบบางอย่างเพื่อทำให้หุ่นยนต์มีท่าทางเหมือนสุนัขมากขึ้น
เช่น กล้องสอดคล้องกับดวงตาของสุนัข หรือส่วนปลายที่สอดคล้องกับจมูกของสุนัข
- การเคลื่อนไหวตามธรรมชาติ
เราใช้การสอนเกี่ยวกับการเคลื่อนไหวของแต่ละท่าทางอย่างเต็มรูปแบบ เพื่อให้การเคลื่อนไหวที่เป็นธรรมชาติมากขึ้น
พร้อมแอนิเมชันที่สมจริงมากขึ้น”

การศึกษาโดยผู้ใช้งานที่เปรียบเทียบท่าทางการเลียนแบบลูกสุนัขกับการแสดงท่าทางแบบธรรมดาสำหรับการสื่อสารในระหว่างงานประกอบ
พบว่าผู้ใช้งานจะจดจำท่าทางที่เหมือนกับสุนัขได้ง่ายว่า แม้ว่าผู้ใช้งานจะไม่ใช่คนรักสุนัขก็ตาม
และท่าทางการเลียนแบบลูกสุนัขก็เข้าใจได้ง่ายกว่า
แม้ว่าการจำแนกแต่ละท่าทางจะไม่สมบูรณ์แบบ ผู้คนยังชอบท่าทางของสัตว์มากกว่าท่าทางที่เป็นนามธรรมที่ออกแบบมาเพื่อสื่อสารแนวคิดเดียวกัน
หรือตามที่งานวิจัยได้เขียนไว้ว่า “ท่าทางการเลียนแบบเหมือนสัตว์นั้นน่าดึงดูดและใช้งานง่ายกว่าอย่างเห็นได้ชัด
และให้ความสุขมากขึ้นเมื่อใช้งาน”
แนวคิดสำหรับการวิจัยนี้มาจากการที่นักวิจัยเป็นคนเลี้ยงสุนัข
นี่เลยกลายเป็นแนวคิดคร่าว ๆ สำหรับการวิจัยนี้ พวกเขาอยากรู้ว่าความเข้าใจโดยสัญชาตญาณที่หลายคนมีเกี่ยวกับพฤติกรรมสุนัขนี้สามารถนำไปใช้กับ Cobot ที่สื่อสารในลักษณะเดียวกันได้หรือไม่
โดยเฉพาะอย่างยิ่งในวิทยาการหุ่นยนต์ทางสังคม มีการสำรวจวิธีการที่ใช้ท่าทางการเลียนแบบพฤติกรรมของสัตว์เนื่องจากลักษณะขี้เล่น
การวิจัยเกี่ยวกับเรื่องนี้ในบริบทของหุ่นยนต์อุตสาหกรรมมีน้อยมาก
เนื่องจากพวกเขามักจะให้ความสำคัญกับประสิทธิภาพมากกว่า

สำหรับวิธีการที่ซับซ้อนของแนวคิดที่สามารถสื่อสารด้วยวิธีนี้คือ
พวกเขาใช้สถานะหุ่นยนต์ที่ค่อนข้างมีความพื้นฐานในการสื่อสาร ความท้าทายเกี่ยวกับสถานะของหุ่นยนต์ที่มีความซับซ้อนมากขึ้น คือ
การค้นหาพฤติกรรมที่คล้ายคลึงกันโดยสัญชาตญาณของสุนัข
สถานะที่ซับซ้อนมากขึ้นสามารถสื่อสารได้ด้วยท่าทางที่ได้รับแรงบันดาลใจจากสุนัข
นี่เป็นทางเลือกหนึ่งสำหรับโคบอท โดยเฉพาะโคบอทที่ใช้ในอุตสาหกรรมที่อาจมีศักยภาพในการลดการทำงานร่วมกันกับหุ่นยนต์และมนุษย์
และทำให้การโต้ตอบระหว่างกันสนุกยิ่งขึ้น
แม้ว่าท่าทางท่าทางของสัตว์ต่างๆ
(อย่างน้อยก็ในการวิจัยเบื้องต้นนี้) นั้นแทบจะไม่มีความแม่นยำในการสื่อสารพอ ๆ
กับการใช้หน้าจอ แต่ฟีเจอร์นี้น่าสนใจมาก ไม่ได้ใช้งานยาก
แถมยังเหมาะสำหรับคนรักสุนัขอีกด้วย ด้วยท่าทางการตอบโต้ที่ดูมีความรู้สึกมากขึ้น
ทำให้ผู้ใช้งานหลายคนหลงรัก Cobot จากการตอบโต้ด้วยการเลียนแบบพฤติกรรมสุนัข
ราวกับว่าพวกเขากำลังเลี้ยงสุนัขอยู่ด้วย
